رادار (Radar)، مخفف عبارت Radio Detection and Ranging، یک فناوری سنسوری است که از امواج رادیویی برای تشخیص حضور اشیاء، اندازهگیری فاصله، سرعت نسبی و جهت آنها استفاده میکند. این فناوری کاربردهای گستردهای در صنایع مختلف از جمله هوانوردی، هواشناسی و دفاعی دارد. در صنعت خودروهای مدرن، رادار به یکی از سنسورهای خودرو حیاتی در سیستمهای کمک راننده پیشرفته (ADAS – Advanced Driver-Assistance Systems) و سیستمهای رانندگی خودران (Autonomous Driving) تبدیل شده است و نقش مهمی در ارتقاء ایمنی خودرو (Vehicle Safety) ایفا میکند.
نحوه کارکرد رادار در خودرو
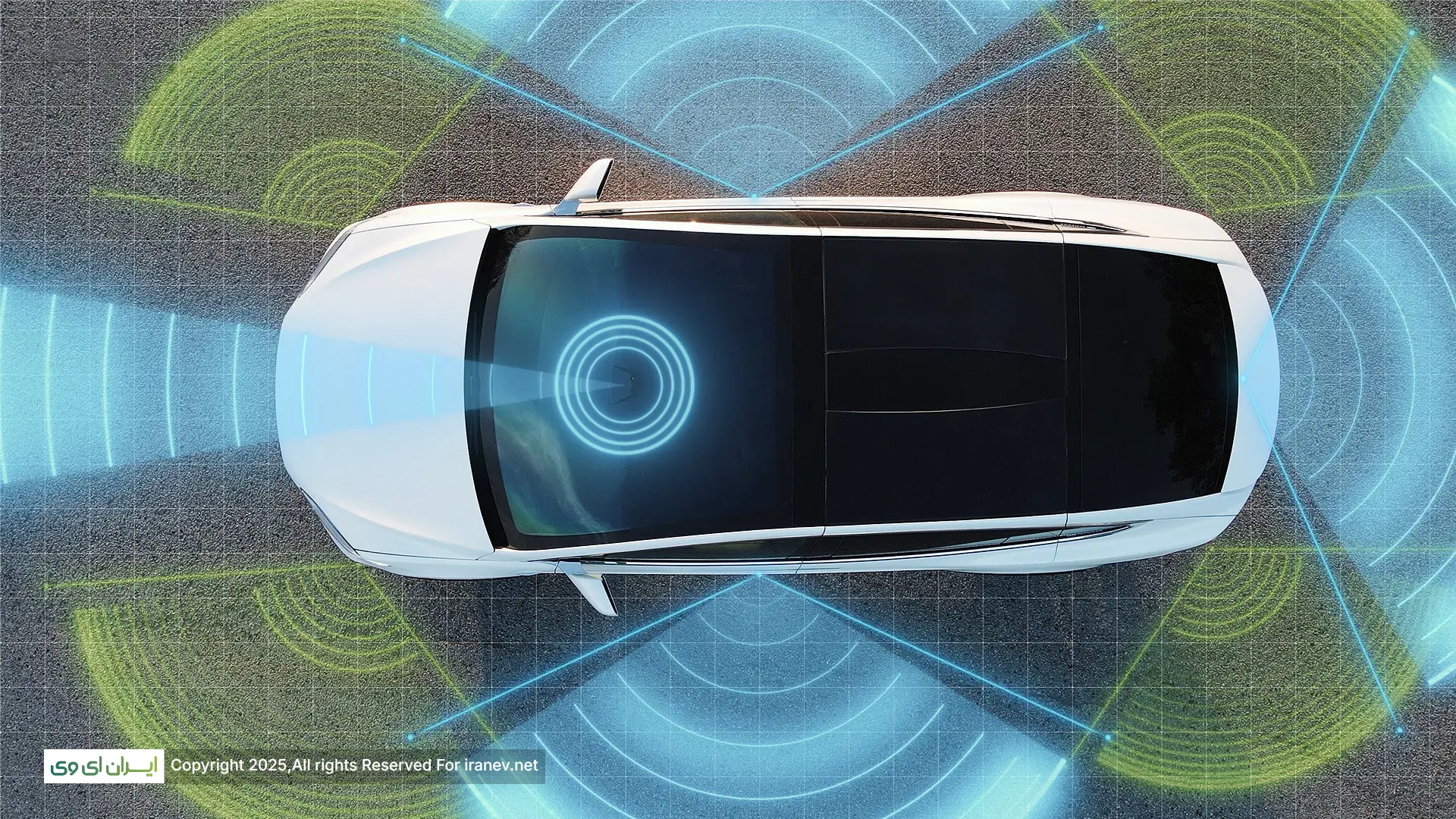
رادار خودرویی با ارسال پالسهای کوتاه امواج رادیویی به محیط اطراف خودرو و دریافت انعکاس (پژواک) این امواج از اشیاء عمل میکند. نحوه استخراج اطلاعات از این پژواکها به شرح زیر است:
- فاصله: با اندازهگیری زمان رفت و برگشت موج رادیویی (زمان پرواز – Time of Flight)، سیستم رادار میتواند فاصله دقیق خودرو تا شیء مورد نظر را محاسبه کند.
- سرعت نسبی: با تحلیل تغییر فرکانس موج رادیویی بازگشتی نسبت به موج فرستاده شده ( اثر داپلر – Doppler Effect)، رادار میتواند سرعت نسبی شیء را محاسبه کند، یعنی با چه سرعتی به خودرو نزدیک یا از آن دور میشود. این قابلیت برای سیستمهایی مانند کروز کنترل تطبیقی (ACC) و ترمز اضطراری خودکار (AEB) بسیار حیاتی است.
- جهت یا زاویه: با استفاده از آرایههای سنسور یا اسکن کردن محیط، رادار میتواند جهت یا زاویه قرارگیری شیء نسبت به مسیر حرکت خودرو را تعیین کند.
انواع رادار خودرویی (بر اساس برد)
رادارهای خودرویی معمولاً بر اساس بردی که پوشش میدهند دستهبندی میشوند:
- رادار دوربرد (Long-Range Radar – LRR): معمولاً در قسمت جلوی خودرو نصب شده و بردی تا ۲۰۰-۲۵۰ متر یا بیشتر را پوشش میدهد. عمدتاً برای کروز کنترل تطبیقی (ACC) در سرعتهای بالا و سیستمهای هشدار و کاهش برخورد از جلو (AEB) در فواصل دور استفاده میشود.
- رادار میانبرد (Mid-Range Radar – MRR): بردی متوسطتر (حدود ۵۰ تا ۱۰۰ متر) دارد و میدان دید وسیعتری نسبت به LRR پوشش میدهد. برای ترمز اضطراری خودکار (AEB) در سناریوهای مختلف (مانند تشخیص عابر پیاده و دوچرخهسوار) و همچنین سیستم تشخیص نقطه کور (BSM) و هشدار ترافیک عبوری از عقب (RCTA) استفاده میشود.
- رادار کوتاهبرد (Short-Range Radar – SRR): بردی در حد چند ده متر با میدان دید بسیار وسیع دارد. برای سیستمهایی مانند سیستم تشخیص نقطه کور، هشدار ترافیک عبوری از عقب، و دستیار پارک استفاده میشود و معمولاً در کنارها یا عقب خودرو نصب میگردد.
اهمیت رادار در سیستمهای ADAS
رادار یکی از ستونهای اصلی سیستمهای ADAS است و مزایای کلیدیای نسبت به سایر سنسورهای خودرو (مانند دوربینها) دارد:
- عملکرد در شرایط آب و هوایی نامساعد و نور کم: امواج رادیویی به خوبی از میان باران، مه، برف، گرد و غبار و دود عبور میکنند و رادار میتواند در شرایطی که دوربینها با مشکل مواجه میشوند (مانند شب، هوای تاریک، یا تابش مستقیم نور خورشید)، به خوبی عمل کند.
- اندازهگیری مستقیم سرعت و فاصله: رادار مستقیماً فاصله و سرعت نسبی اشیاء را اندازهگیری میکند که دادههایی بسیار دقیق و قابل اعتماد برای سیستمهای کنترلی مانند ACC و AEB فراهم میآورد. دوربینها این اطلاعات را به صورت غیرمستقیم از طریق تحلیل تصویر استخراج میکنند.
- مکمل سایر سنسورها: دادههای رادار اغلب با دادههای سایر سنسورها مانند دوربینها و لیدار ترکیب میشوند (Sensor Fusion) تا درک جامعتر و قابل اطمینانتری از محیط اطراف خودرو حاصل شود. رادار اطلاعات دقیق در مورد فاصله و سرعت را فراهم میکند، در حالی که دوربینها اطلاعات بصری غنی و قابلیت تشخیص و طبقهبندی انواع اشیاء را دارند.
ویژگیهای ADAS که از رادار استفاده میکنند
بسیاری از سیستمهای کمک راننده پیشرفته به رادار وابسته هستند، از جمله:
- کروز کنترل تطبیقی (ACC): استفاده از رادار جلویی برای پایش خودروی روبرو و حفظ فاصله ایمن.
- ترمز اضطراری خودکار (AEB) و هشدار برخورد از جلو (FCW): استفاده از رادار جلویی برای تشخیص موانع و فعال کردن هشدار یا ترمزگیری خودکار.
- سیستم تشخیص نقطه کور (BSM): استفاده از رادارهای کناری/عقبی برای تشخیص خودروها در نقاط کور راننده.
- هشدار ترافیک عبوری از عقب (RCTA): استفاده از رادارهای عقبی برای تشخیص خودروهایی که هنگام دنده عقب گرفتن از اطراف نزدیک میشوند.
ارتباط با خودروهای برقی و هیبریدی
رادار به عنوان یک سنسور پیشرفته در پکیجهای سیستمهای کمک راننده پیشرفته (ADAS)، به طور فزایندهای در خودروهای برقی (EVs) و هیبریدیهای مدرن به کار میرود. این خودروها که اغلب از نظر فناوری در سطح بالایی قرار دارند، بهراحتی میتوانند سیستمهای مبتنی بر رادار را با معماری الکترونیکی و نرمافزاری خود یکپارچه کنند. رادار به ارتقاء سطح ایمنی فعال در این خودروها کمک کرده و قابلیتهای مهمی را فراهم میآورد.
رادار در بازار خودروی ایران (در زمینه ADAS)
بسیاری از خودروهای برقی و هیبریدی وارداتی به ایران که مجهز به پکیجهای سیستمهای کمک راننده پیشرفته (ADAS) هستند، دارای سنسورهای رادار (معمولاً در جلو، عقب یا کنارها) هستند. این سنسورها عملکرد قابلیتهایی مانند کروز کنترل تطبیقی، ترمز اضطراری خودکار، و سیستم تشخیص نقطه کور را در این خودروها در ایران ممکن میسازند.
مزیت عملکرد رادار در شرایط مختلف آب و هوایی (مانند باران یا مه در برخی مناطق ایران) یا در شب، برای رانندگان ایرانی که از این خودروها استفاده میکنند مفید است. با این حال، مهم است که رانندگان در ایران از محدودیتهای کلی سیستمهای ADAS آگاه باشند؛ اگرچه رادار اطلاعات دقیقی از فاصله و سرعت ارائه میدهد، اما عملکرد نهایی سیستم ADAS (که از دادههای رادار، دوربینها و نرمافزار تحلیل استفاده میکند) در محیطهای رانندگی بسیار پیچیده و غیرقابل پیشبینی (مانند ترافیک شلوغ با حرکات ناگهانی زیاد) ممکن است تحت تأثیر قرار گیرد. بهرغم این، حضور رادار در این خودروها سطح ایمنی فعال آنها را در ایران به طور قابل توجهی افزایش میدهد.
نتیجهگیری
رادار یک فناوری سنسوری حیاتی در سیستمهای کمک راننده پیشرفته (ADAS) و رانندگی خودران در خودروهای مدرن، از جمله خودروهای برقی و هیبریدی است. این سنسور با استفاده از امواج رادیویی، قابلیت تشخیص دقیق اشیاء، اندازهگیری فاصله و سرعت نسبی آنها را بهخصوص در شرایط دید محدود (مانند شب یا هوای نامساعد) داراست. رادار به عنوان یک سنسور مکمل در کنار دوربینها و لیدار، اطلاعات ارزشمندی را برای عملکردهای ایمنی کلیدی مانند کروز کنترل تطبیقی (ACC) و ترمز اضطراری خودکار (AEB) فراهم میکند. خودروهای برقی و هیبریدی وارداتی به ایران نیز اغلب مجهز به رادار هستند و این فناوری به ارتقاء سطح ایمنی فعال در این خودروها در بازار ایران کمک میکند.